|
Tianyuan (Roger) Dai I'm a first-year PhD student at UT Austin, advised by Prof. Yuke Zhu. I am also a research intern at NVIDIA Generalist Embodied Agent Research (GEAR) group. My research is at the intersection of robotics, machine learning, and computer vision. I am especially passionate about developing generalizable robot skills. |

|
ResearchMy long-term vision is to integrate human-level understanding of real-world environments into robotics algorithms that assist people with daily tasks using data-driven approaches. I am currently studying how to achieve generalizable robot manipulation skills in a user and data-efficient manner, from both algorithm and data perspectives. |
News
|
Publications* Equal Contribution |
|
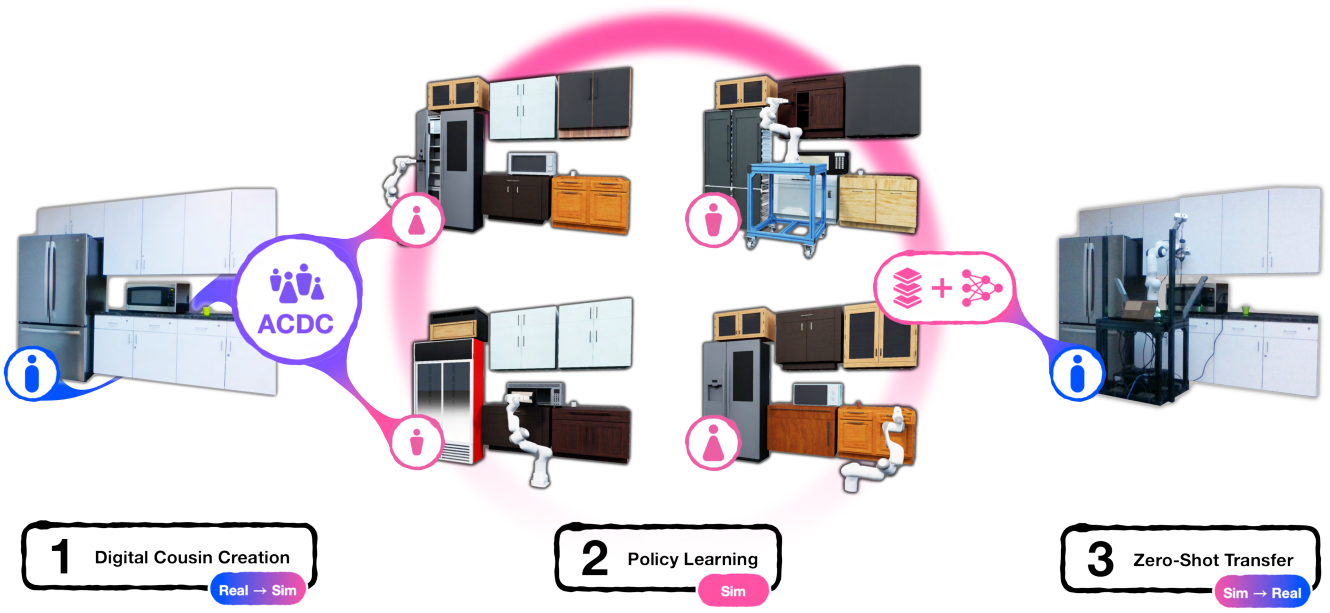
Automated Creation of Digital Cousins for Robust Policy Learning
Tianyuan Dai*, Josiah Wong*, Yunfan Jiang, Chen Wang, Cem Gokmen, Ruohan Zhang, Jiajun Wu, Li Fei-Fei CoRL, 2024 project page / twitter / arXiv / code |
|
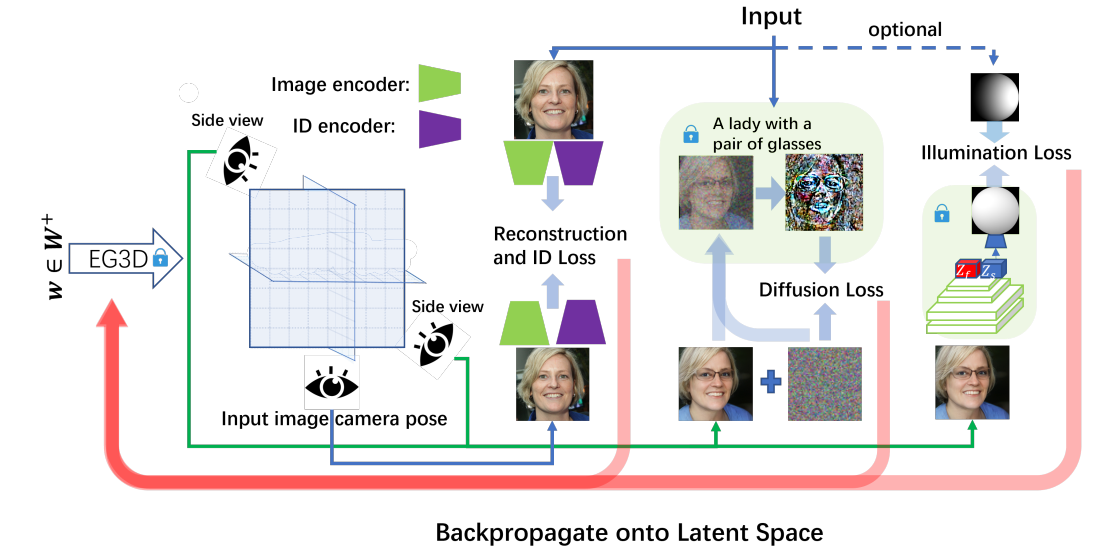
FaceDNeRF: Semantics-Driven Face Reconstruction, Prompt Editing and Relighting with Diffusion Models
Hao Zhang*, Yanbo Xu*, Tianyuan Dai*, Yu-Wing Tai, Chi-Keung Tang NeurIPS, 2023 project page / video / arXiv / code |
|
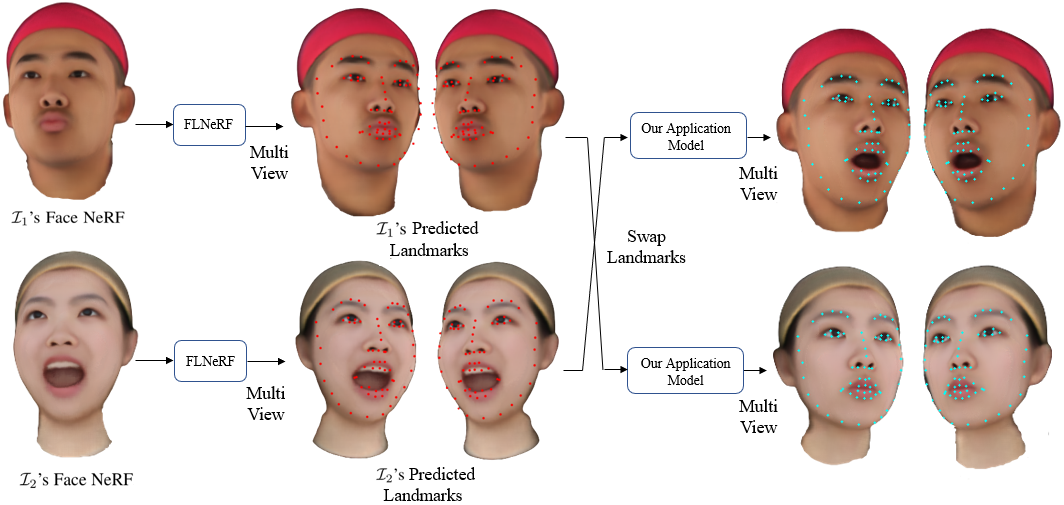
FLNeRF: 3D Facial Landmarks Estimation in Neural Radiance Fields
Hao Zhang*, Tianyuan Dai*, Yu-Wing Tai, Chi-Keung Tang Champion, IEEE (Hong Kong) Computational Intelligence Chapter Final Year Project Competition, 2022-2023 video / arXiv |
Teaching |
|
Stanford CS237B: Principles of Robot Autonomy II
Winter 2025 Teaching Assistant |
|
Stanford CS229: Machine Learning
Autumn 2024 Teaching Assistant |
|
|
Stanford CS231A: Computer Vision, From 3D Perception to 3D Reconstruction and beyond
Spring 2024 Teaching Assistant |
|
|